Algorithm particle_filter S t-1 u t z t. 20 01174 IEE Created Date 7312001 11359 P.
Optimal Estimation Algorithms Kalman And Particle Filters By Pier Paolo Ippolito Towards Data Science
Anintroductiontoparticlefilters AndreasSvensson DepartmentofInformationTechnology UppsalaUniversity June102014 June102014 116 AndreasSvensson.

. Update normalization factor 8. Learn More Robots use a surprisingly simple but powerful algorithm to find out where they are on a map a problem called localization by engineers. Bootstrap particle filter for Python.
Python-3x numpy matplotlib prediction particle-filter. A tutorial on particle filters for on-line nonlinearnon-gaussian bayesi an tracking - Target Tracking. If you are interested in a more detailed mathematical explanation of Kalman Filters this tutorial by MIT Tony Lacey is a great place where to start 2.
Sample index ji from the discrete distribution given by w t-1 5. Linear Kalmar Filter Extended Kalman filter and Unscented Kalman Filter. Compute importance weight 7.
Then they can find an exact solution using that simplified model. The most popular 3 dates back to 2002 and like the edited volume 16 from 2001 it is now somewhat outdated. The green turtle is the actual location while the orange turtle is the estimated location.
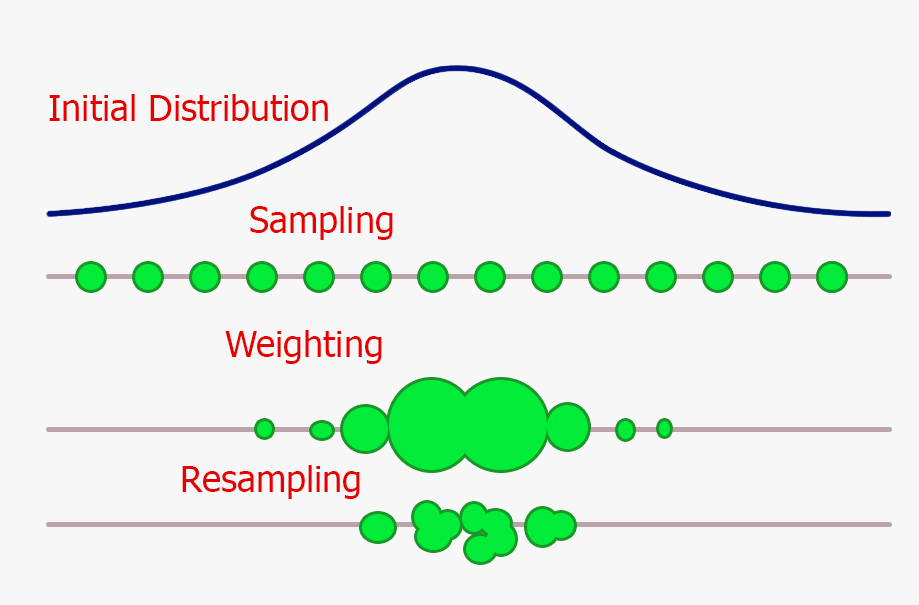
The algorithm known as particle filtering looks amazingly cool. The arrows are particles. Perform a prediction step only.
K 1 d x k. Internal state space of d dimensions. Particle filters are tractable whereas Kalmanfilters are not.
Clearly the filter is performing better but at the cost of large memory usage and long run times. Calling update without an observation will update the model without any data ie. Sample index ji from the discrete distribution given by w t-1 5.
In this project the turtle location and heading direction in maze was inferred using particle filter. For Generate new samples 4. Internationally particle filtering has been applied in various fields.
Algorithms and Applications Ref. The particle filter was popularized in the early 1990s and has been used for solving estimation problems ever since. Particle Filter Prototype 23.
This package implements a bootstrap particle filter that can be used for recursive Bayesian estimation and forecasting. These techniques allow for Bayesian inference in complex dynamic state-space models and have. Create a ParticleFilter object then call updateobservation with an observation array to update the state of the particle filter.
This requires an approximately uniformly coloured object which moves at a speed no larger than stepsize per frame. Algorithm particle_filter S t-1 u t z t. There exist different varieties of Kalman Filters some examples are.
As a result of the popularity of particle methods a few tutorials have already been published on the subject 3 8 18 29. P Sample from 6. 2017-04-05 last modified 2008-10-08 created A basic particle filter tracking algorithm using a uniformly distributed step as motion model and the initial target colour as determinant feature for the weighting function.
-017 0084 0005 0005 There are many more particles at x1 and we have a convincing cloud at x2. Measured repeatedly in some noisy way. Lane Detection and Particle Filter Tracking.
Update normalization factor 8. The key idea is that a lot of methods like Kalmanfilters try to make problems more tractable by using a simplified version of your full complex model. For Generate new samples 4.
Observation space of h dimensions. This implementation assumes that the video stream. In addition the multi-modal processing capability of the particle filter is one of the reasons why it is widely used.
Then you can use pypfilt to estimate the state and parameters of this system. A Tutorial on Particle Filters Maarten Speekenbrink Experimental Psychology University College London Abstract This tutorial aims to provide an accessible introduction to particle lters and sequential Monte Carlo SMC more generally. I expect a set of 300 coordinate values estimated as a result of the particle filter so I can replace my missing values in original files with this predicted ones.
Seed2 run_pf1N100000 iters8 plot_particlesTrue xlim08 ylim08 final position error variance. In this first article we attempt to explain the intuition behind particle filters. Python Cope 17.
P z k z 1. Welcome to the pypfilt documentation. Compute importance weight 7.
Blue arrows stand for low probability particles while red. More elaborate mathematical derivations can be found in 6 11. Particle Filters Revisited 1.
10 Bayesian filters combine prior knowledge on how the state is expected to evolve over time with measurements that include information related to the current state. Return S t S. Extensive research has advanced.
Particle Filter Implementations in Python and C with lecture notes and visualizations. Particle filter is a Monte Carlo algorithm used to solve statistical inference problems. In part 2 we will elucidate the mathematics.
The superiority of particle filter technology in nonlinear and non-Gaussian systems determines its wide range of applications. K 1 p z k x k p x k z 1. The standard algorithm can be understood and implemented with limited effort due to the widespread availability of tutorial material and code examples.

Uhlik Bpy Blender Python Scripts Blender Github Python

Particle Filter Explained And Code Example In Python Youtube

C4d Automated Knitting Rig Cinema 4d Tutorial Motion Graphics Cinema 4d Motion Graphics Tutorial
Basic Tutorial Particles Alpha Documentation
Particle Filter Explained With Python Code Youtube

Particle Filter Localization With Python Code Youtube

Realflow Dspline Tutorial Realflow Cinema 4d Tutorial Motion Graphics Tutorial Tutorial

Particle Filter Explained And Code Example In Python Youtube
0 komentar
Posting Komentar